拉力传感器又叫电阻应变式传感器,隶属于称重传感器系列,是一种将物理信号转变为可测量的电信号输出的装置。
拉力传感器_拉力传感器 -简介
拉力传感器又叫电阻应变式传感器,隶属于称重传感器系列,是一种将物理信号转变为可测量的电信号输出的装置,它使用两个拉力传递部分传力,在其结构中含有力敏器件和两个拉力传递部分,在力敏器件中含有压电片、压电片垫片,后者含有基板部分和边缘传力部分,其特征是使两个拉力传递部分的两端分别固定在一起,用两端之间的横向作用面将力敏器件夹紧,压电片垫片在一侧压在压电片的中心区域,基板部分位于压电片另一侧与边缘传力部分之间并紧贴压电片,其用途之一是制成钩秤以取代杆枰。实际工作环境对于正确选用拉力传感器至关重要,它不仅关系到拉力传感器能否正常工作以及它的安全和使用寿命,甚至整个衡器的可靠性和安全性。 拉力传感器基于这样一个原理:弹性体(弹性元件,敏感梁)在外力作用下产生弹性变形,使粘贴在他表面的电阻应变片(转换元件)也随同产生变形,电阻应变片变形后,它的阻值将发生变化(增大或减小),再经相应的测量电路把这一电阻变化转换为电信号(电压或电流),从而完成了将外力变换为电信号的过程。考虑到使用地点的策略加速度和空气浮力对转换的影响,拉力传感器的性能指标主要包括有线性误差、滞后误差、重复性误差、蠕变、零点温度特性和灵敏度温度特性等。
拉力传感器的优点是精度高,测量范围广,寿命长,结构简单,频响特性好,能在恶劣条件下工作,易于实现小型化、整体化和品种多样化等。它的缺点是对于大应变有较大的非线性、输出信号较弱,但可采取一定的补偿措施。因此它广泛应用于自动测试和控制技术中。
拉力传感器_拉力传感器 -原理
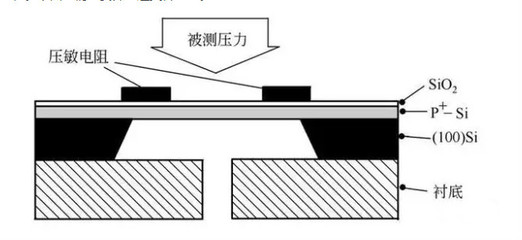
拉力传感器基于这样一个原理:弹性体(弹性元件,敏感梁)在外力作用下产生弹性变形,使粘贴在他表面的电阻应变片(转换元件)也随同产生变形,电阻应变片变形后,它的阻值将发生变化(增大或减小),再经相应的测量电路把这一电阻变化转换为电信号(电压或电流),从而完成了将外力变换为电信号的过程。
考虑到使用地点的策略加速度和空气浮力对转换的影响,拉力传感器的性能指标主要包括有线性误差、滞后误差、重复性误差、蠕变、零点温度特性和灵敏度温度特性等。
拉力传感器的优点是精度高,测量范围广,寿命长,结构简单,频响特性好,能在恶劣条件下工作,易于实现小型化、整体化和品种多样化等。它的缺点是对于大应变有较大的非线性、输出信号较弱,但可采取一定的补偿措施。因此它广泛应用于自动测试和控制技术中。
拉力传感器_拉力传感器 -拉力传感器构造分类
拉力传感器基于称重传感器的原理,使用两个拉力传递部分来传力,内部构造有其中的力敏器固定,压电片垫片在一侧压在压电片的中心区域,基板部分位于压电片另一侧与边缘传力部分之间并紧贴压电片。根据不同拉力的力度和大小设计出外观不同的拉力传感器,有S型拉力传感器、板环拉力传感器等等。S型拉力传感器是力学传感器中最为常见的一种传感器,大部分是用于测量固体间的拉力和压力,通常也被人们也称之为拉压力传感器,因为它的外形像S形状,所以习惯上也称S型拉力传感器,它的优点是安装容易,使用方便,适用于吊秤,配料秤,机改秤等电子测力系统.板环拉力传感器同样是外形的缘故而得名,而它的优点是更加适合大量程,恶劣条件下工作,频响特性好,很多被应用在建材、水泥、化工,起重、起吊行业。
拉力传感器_拉力传感器 -详细参数
额定载荷 5,10,20,30,100,200,300,500kg, 1,2,3,5,10,15,20t
精度等级 C2
绝缘电阻(MΩ) ≥5000(100VDC)
综合误差(%F.S) 0.03
激励电压(V) 9~12 (DC)
灵敏度(mV/V) 2.0±0.02
温度补偿范围(℃) -10 ~ +40
非线性(%F.S) 0.03
使用温度范围(℃) -35 ~ +65
滞后(%F.S) 0.03
零点温度影响(%F.S/10℃) 0.03
重复性(%F.S) 0.01
灵敏度温度影响(%F.S/10℃) 0.03
蠕变(%F.S/30min) 0.02
安全过载范围(%F.S) 150
零点输出(%F.S) ±1
极限过载范围(%F.S) 200
输入阻抗(Ω) 700±7
防护等级 IP65
输出阻抗(Ω) 700±7 电缆线 四芯屏蔽电缆 3m
接线方法 输入(电源) + : 红色;输入(电源) - : 黑色;输出(信号) + : 绿色;输出(信号) - :白色
拉力传感器_拉力传感器 -拉力传感器的特征
使两个拉力传递部分的两端分别固定在一起,干燥箱用两端之间的横向作用面将力敏器件夹紧,压电片垫片在一侧压在压电片的中心区域,基板部分位于压电片另一侧与边缘传力部分之间并紧贴压电片。其用途之一是制成钩秤以取代杆枰。
拉力传感器_拉力传感器 -拉力传感器如何接线
首先确定显示器上传感器器接口的电源正、电源负、反馈正、反馈负、信号正、信号负,如果是6线制传器,测出传感器电阻最小的两组线分别是电源正、反馈正;电源负、反馈负,接到显示器后对传感器加载,测量另外两根线的电压值(毫伏)正接显示器信号正,负接显示器信号负;如果是四线值,需要将显示器的电源正与反馈正短接、电源负与反馈负短接,用万用表测量传感器四根线,其中电阻值最大的两根是电源,另外两根是信号。根据传感器的产地,可以用引线的色判断,内国生产厂家一般是红为电源正,黑为电源负,绿为信号正,白为信号负;欧美生产的传感器一般绿为电源正,黑为电源负,白为信号正,红为信号负。
拉力传感器_拉力传感器 -拉力传感器的优缺点
优点:
精度高,测量范围广,寿命长,结构简单,频响特性好,能在恶劣条件下工作,易于实现小型化、整体化和品种多样化等。
缺点:
对于大应变有较大的非线性、输出信号较弱,但可采取一定的补偿措施。
拉力传感器_拉力传感器 -安装使用时注意事项
1、拉力传感器要轻拿轻放,尤其对于用合金铝材料作为弹性体的小容量传感器,任何振动造成的冲击或者跌落,都很有可能造成很大的输出误差。
2、设计加载装置及安装时应保证加载力的作用线与拉力传感器受力轴线重合,使倾斜负荷和偏心负荷的影响减至最小。
3、在水平调整方面。如果使用的是单只拉力传感器的话,其底座的安装平面要使用水平仪调整直到水平;如果是多个传感器同时测量的情况,那么它们底座的安装面要尽量保持在一个水平面上,这样做的目的主要是为了保证每个传感器所承受的力量基本一致。
4、按照其说明中拉力传感器的量程选定来确定所用传感器的额定载荷。
5、传感器的底座安装面应尽可能的平整和清洁,没有任何油污或者胶膜等存在。安装底座本身应具备足够的强度和刚性,通常要求高于传感器本身的强度和刚度。
6、传感器外壳、保护盖板、引线接头均经密封处理,用户不准打开。
7、为防止化学腐蚀.安装时宜用凡士林涂抹拉力传感器外表面。应避免阳光直晒和环境温度剧变的场台使用
8、在无法避免时应加装防护或缓解装置。
9、为防止大电流直接窜过传感器本体而损坏传感器禁止在传感器安装后进行电焊作业,在万不得已时应
10、在拉力传感器加载装置两端加接铜编织线做的旁路器。
11、电缆线不宜自行加长,在确实需加长时应在接头处锡焊,并加防潮密封胶。
12、在拉力传感器周围最好采用一些挡板把传感器罩起来。这样做的目的可防止杂物掉进传感器的运动部分,影响其测量精度。
13、传感器的电缆线应远离强动力电源线或有脉冲波的场所,无法避竞时应把拉力传感器的电缆线单独穿入铁管内,并尽量缩短连接距离。
14、按其说明中的拉力传感器量程选定来确定所用传感器的额定载荷,拉力传感器虽然本身具备一定的过载能力,但在安装和使用过程中应尽量避免此种情况。有时短时间的超载,也可能会造成传感器永久损坏。
15、在高度精度使用场合,应使拉力传感器和仪表在预热30分钟后使用。
16、传感器应放在干燥通风无腐蚀性气体的室内。
拉力传感器_拉力传感器 -应用实例
一、在电动葫芦上的应用
电动葫芦是集电动机,减速机和钢丝绳卷筒为一体的小型起重设备,大多数还带有行走小车,配合单梁桥式或门式起重机,组成一个完整的起重机械。电动葫芦是是工矿企业,仓储码头等场所必备的起重设备。由于起重机在使用的过程中需要起吊不同吨位的重物,因此就需要配备一套拉力传感器系统对起吊重物进行实时监控,以便当前工作状况做出判断,做出相应的声光指示如正常起重状态,满载状态,超载状态等等。
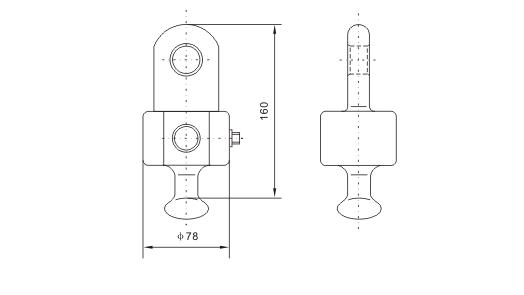
分体式电动葫芦超载限制器一般使用轴销式拉力传感器、S型拉力传感器或者板环式拉力传感器,根据电动葫芦的结构,选择便于的拉力传感器类型。具体选择的时候,还需要了解电动葫芦的载荷、钢丝绳倍率、钢丝绳直径以及可供电源等数据,与相应传感器的参数比较,以便于在购买超载限制器后可投入正常使用,适用于环链式电动葫芦。
一体式电动葫芦超载限制器传感器与显示仪表捆绑在一起,主要使用的传感器是旁压传感器。选择传感器的时候同样需要关注电动葫芦的载荷、钢丝绳倍率、钢丝绳直径以及可供电源等因素,其综合误差一般在±0.02%F.S。一体式电动葫芦超载限制器的优点在于安装方便,价格较低,适用于钢丝绳式电动葫芦。