卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。斯坦利・施密特(Stanley Schmidt)首次实现了卡尔曼滤波器。卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导航电脑使用了这种滤波器。 关于这种滤波器的论文由Swerling (1958), Kalman (1960)与 Kalman and Bucy (1961)发表。数据滤波是去除噪声还原真实数据的一种数据处理技术, Kalman滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态. 由于, 它便于计算机编程实现, 并能够对现场采集的数据进行实时的更新和处理, Kalman滤波是目前应用最为广泛的滤波方法, 在通信, 导航, 制导与控制等多领域得到了较好的应用.
卡尔曼_卡尔曼滤波 -定义
传统的滤波方法,只能是在有用信号与噪声具有不同频带的条件下才能实现.20世纪40年代,N.维纳和A.H.柯尔莫哥罗夫把信号和噪声的统计性质引进了滤波理论,在假设信号和噪声都是平稳过程的条件下,利用最优化方法对信号真值进行估计,达到滤波目的,从而在概念上与传统的滤波方法联系起来,被称为维纳滤波。这种方法要求信号和噪声都必须是以平稳过程为条件。60年代初,卡尔曼(R.E.Kalman)和布塞(R. S.Bucy)发表了一篇重要的论文《线性滤波和预测 理论的新成果》,提出了一种新的线性滤波和预测理由论,被称之为卡尔曼滤波。特点是在线性状态空间表示的基础上对有噪声的输入和观测信号进行处理,求取系统状态或真实信号。
这种理论是在时间域上来表述的,基本的概念是:在线性系统的状态空间表示基础上,从输出和输入观测数据求系统状态的最优估计。这里所说的系统状态,是总结系统所有过去的输入和扰动对系统的作用的最小参数的集合,知道了系统的状态就能够与未来的输入与系统的扰动一起确定系统的整个行为。
卡尔曼滤波不要求信号和噪声都是平稳过程的假设条件。对于每个时刻的系统扰动和观测误差(即噪声),只要对它们的统计性质作某些适当的假定,通过对含有噪声的观测信号进行处理,就能在平均的意义上,求得误差为最小的真实信号的估计值。因此,自从卡尔曼滤波理论问世以来,在通信系统、电力系统、航空航天、环境污染控制、工业控制、雷达信号处理等许多部门都得到了应用,取得了许多成功应用的成果。例如在图像处理方面,应用卡尔曼滤波对由于某些噪声影响而造成模糊的图像进行复原。在对噪声作了某些统计性质的假定后,就可以用卡尔曼的算法以递推的方式从模糊图像中得到均方差最小的真实图像,使模糊的图像得到复原。
卡尔曼_卡尔曼滤波 -性质
①卡尔曼滤波是一个算法,它适用于线性、离散和有限维系统。每一个有外部变量的自回归移动平均系统(ARMAX)或可用有理传递函数表示的系统都可以转换成用状态空间表示的系统,从而能用卡尔曼滤波进行计算。
②任何一组观测数据都无助于消除x(t)的确定性。增益K(t)也同样地与观测数据无关。
③当观测数据和状态联合服从高斯分布时用卡尔曼递归公式计算得到的是高斯随机变量的条件均值和条件方差,从而卡尔曼滤波公式给出了计算状态的条件概率密度的更新过程线性最小方差估计,也就是最小方差估计。
卡尔曼_卡尔曼滤波 -实现形式
目前,卡尔曼滤波已经有很多不同的实现.卡尔曼最初提出的形式现在一般称为简单卡尔曼滤波器.除此以外,还有施密特扩展滤波器,信息滤波器以及很多Bierman, Thornton 开发的平方根滤波器的变种.最常见的卡尔曼滤波器是锁相环,它在收音机,计算机和几乎任何视频或通讯设备中广泛存在.
卡尔曼_卡尔曼滤波 -典型实例
卡尔曼滤波
卡尔曼滤波的一个典型实例是从一组有限的,对物体位置的,包含噪声的观察序列预测出物体的坐标位置及速度. 在很多工程应用(雷达, 计算机视觉)中都可以找到它的身影. 同时,卡尔曼滤波也是控制理论以及控制系统工程中的一个重要话题.
卡尔曼_卡尔曼滤波 -应用
比如,在雷达中,人们感兴趣的是跟踪目标,但目标的位置、速度、加速度的测量值往往在任何时候都有噪声。卡尔曼滤波利用目标的动态信息,设法去掉噪声的影响,得到一个关于目标位置的好的估计。这个估计可以是对当前目标位置的估计(滤波),也可以是对于将来位置的估计(预测),也可以是对过去位置的估计(插值或平滑)。
扩展卡尔曼滤波(EXTEND KALMAN FILTER, EKF)
扩展卡尔曼滤波器
是由kalman filter考虑时间非线性的动态系统,常应用于目标跟踪系统。
卡尔曼_卡尔曼滤波 -状态估计
状态估计
状态估计是卡尔曼滤波的重要组成部分。一般来说,根据观测数据对随机量进行定量推断就是估计问题,特别是对动态行为的状态估计,它能实现实时运行状态的估计和预测功能。比如对飞行器状态估计。状态估计对于了解和控制一个系统具有重要意义,所应用的方法属于统计学中的估计理论。最常用的是最小二乘估计,线性最小方差估计、最小方差估计、递推最小二乘估计等。其他如风险准则的贝叶斯估计、最大似然估计、随机逼近等方法也都有应用。
状态量
受噪声干扰的状态量是个随机量,不可能测得精确值,但可对它进行一系列观测,并依据一组观测值,按某种统计观点对它进行估计。使估计值尽可能准确地接近真实值,这就是最优估计。真实值与估计值之差称为估计误差。若估计值的数学期望与真实值相等,这种估计称为无偏估计。卡尔曼提出的递推最优估计理论,采用状态空间描述法,在算法采用递推形式,卡尔曼滤波能处理多维和非平稳的随机过程。
理论
卡尔曼滤波理论的提出,克服了威纳滤波理论的局限性使其在工程上得到了广泛的应用,尤其在控制、制导、导航、通讯等现代工程方面。
卡尔曼_卡尔曼滤波 -MATLAB程序
MATLAB
N=200;
w(1)=0;
w=randn(1,N)
x(1)=0;
a=1;
for k=2:N;
x(k)=a*x(k-1)+w(k-1);
end
V=randn(1,N);
q1=std(V);
Rvv=q1.^2;
q2=std(x);
Rxx=q2.^2;
q3=std(w);
Rww=q3.^2;
c=0.2;
Y=c*x+V;
p(1)=0;
s(1)=0;
for t=2:N;
p1(t)=a.^2*p(t-1)+Rww;
b(t)=c*p1(t)/(c.^2*p1(t)+Rvv);
s(t)=a*s(t-1)+b(t)*(Y(t)-a*c*s(t-1));
p(t)=p1(t)-c*b(t)*p1(t);
end
t=1:N;
plot(t,s,'r',t,Y,'g',t,x,'b');
function [x, V, VV, loglik] = kalman_filter(y, A, C, Q, R, init_x, init_V, varargin)
% Kalman filter.
% [x, V, VV, loglik] = kalman_filter(y, A, C, Q, R, init_x, init_V, ...)
%
% INPUTS:
% y(:,t) - the observation at time t
% A - the system matrix
% C - the observation matrix
% Q - the system covariance
% R - the observation covariance
% init_x - the initial state (column) vector
% init_V - the initial state covariance
%
% OPTIONAL INPUTS (string/value pairs [default in brackets])
% 'model' - model(t)=m means use params from model m at time t [ones(1,T) ]
% In this case, all the above matrices take an additional final dimension,
% i.e., A(:,:,m), C(:,:,m), Q(:,:,m), R(:,:,m).
% However, init_x and init_V are independent of model(1).
% 'u' - u(:,t) the control signal at time t [ [] ]
% 'B' - B(:,:,m) the input regression matrix for model m
%
% OUTPUTS (where X is the hidden state being estimated)
% x(:,t) = E[X(:,t) | y(:,1:t)]
% V(:,:,t) = Cov[X(:,t) | y(:,1:t)]
% VV(:,:,t) = Cov[X(:,t), X(:,t-1) | y(:,1:t)] t>= 2
% loglik = sum{t=1}^T log P(y(:,t))
%
% If an input signal is specified, we also condition on it:
% e.g., x(:,t) = E[X(:,t) | y(:,1:t), u(:, 1:t)]
% If a model sequence is specified, we also condition on it:
% e.g., x(:,t) = E[X(:,t) | y(:,1:t), u(:, 1:t), m(1:t)]
[os T] = size(y);
ss = size(A,1); % size of state space
% set default params
model = ones(1,T);
u = [];
B = [];
ndx = [];
args = varargin;
nargs = length(args);
for i=1:2:nargs
switch args
case 'model', model = args{i+1};
case 'u', u = args{i+1};
case 'B', B = args{i+1};
case 'ndx', ndx = args{i+1};
otherwise, error(['unrecognized argument ' args])
end
end
x = zeros(ss, T);
V = zeros(ss, ss, T);
VV = zeros(ss, ss, T);
loglik = 0;
for t=1:T
m = model(t);
if t==1
%prevx = init_x(:,m);
%prevV = init_V(:,:,m);
prevx = init_x;
prevV = init_V;
initial = 1;
else
prevx = x(:,t-1);
prevV = V(:,:,t-1);
initial = 0;
end
if isempty(u)
[x(:,t), V(:,:,t), LL, VV(:,:,t)] = ...
kalman_update(A(:,:,m), C(:,:,m), Q(:,:,m), R(:,:,m), y(:,t), prevx, prevV, 'initial', initial);
else
if isempty(ndx)
[x(:,t), V(:,:,t), LL, VV(:,:,t)] = ...
kalman_update(A(:,:,m), C(:,:,m), Q(:,:,m), R(:,:,m), y(:,t), prevx, prevV, ...
'initial', initial, 'u', u(:,t), 'B', B(:,:,m));
else
i = ndx;
% copy over all elements; only some will get updated
x(:,t) = prevx;
prevP = inv(prevV);
prevPsmall = prevP(i,i);
prevVsmall = inv(prevPsmall);
[x(i,t), smallV, LL, VV(i,i,t)] = ...
kalman_update(A(i,i,m), C(:,i,m), Q(i,i,m), R(:,:,m), y(:,t), prevx(i), prevVsmall, ...
'initial', initial, 'u', u(:,t), 'B', B(i,:,m));
smallP = inv(smallV);
prevP(i,i) = smallP;
V(:,:,t) = inv(prevP);
end
end
loglik = loglik + LL;
end
Z=(1:100); %观测值
noise=randn(1,100); %方差为1的高斯噪声
Z=Z+noise;
X=[0;0]; %状态
P=[10;01]; %状态协方差矩阵
F=[11;01]; %状态转移矩阵
Q=[0.0001,0;00.0001]; %状态转移协方差矩阵
H=; %观测矩阵
R=1; %观测噪声方差
figure;
hold on;
fori=1:100
X_ = F*X;
P_ = F*P*F'+Q;
K = P_*H'/(H*P_*H'+R);
X = X_+K*(Z(i)-H*X_);
P = (eye(2)-K*H)*P_;
plot(X(1), X(2)); %画点,横轴表示位置,纵轴表示速度
end
卡尔曼_卡尔曼滤波 -通俗解释
简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。
卡尔曼滤波器的介绍 :
为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。
在介绍他的5条公式之前,先让我们来根据下面的例子一步一步的探索。
假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就是下一分钟的温度等于现在这一分钟的温度(假设我们用一分钟来做时间单位)。假设你对你的经验不是100%的相信,可能会有上下偏差几度。我们把这些偏差看成是高斯白噪声(White Gaussian Noise),也就是这些偏差跟前后时间是没有关系的而且符合高斯分布(Gaussian Distribution)。另外,我们在房间里放一个温度计,但是这个温度计也不准确的,测量值会比实际值偏差。我们也把这些偏差看成是高斯白噪声。
好了,现在对于某一分钟我们有两个有关于该房间的温度值:你根据经验的预测值(系统的预测值)和温度计的值(测量值)。下面我们要用这两个值结合他们各自的噪声来估算出房间的实际温度值。
假如我们要估算k时刻的实际温度值。首先你要根据k-1时刻的温度值,来预测k时刻的温度。因为你相信温度是恒定的,所以你会得到k时刻的温度预测值是跟k-1时刻一样的,假设是23度,同时该值的高斯噪声的偏差是5度(5是这样得到的:如果k-1时刻估算出的最优温度值的偏差是3,你对自己预测的不确定度是4度,他们平方相加再开方,就是5)。然后,你从温度计那里得到了k时刻的温度值,假设是25度,同时该值的偏差是4度。
由于我们用于估算k时刻的实际温度有两个温度值,分别是23度和25度。究竟实际温度是多少呢?相信自己还是相信温度计呢?究竟相信谁多一点,我们可以用他们的协方差(covariance)来判断。因为Kg=5^2/(5^2+4^2),所以Kg=0.61,我们可以估算出k时刻的实际温度值是:23+0.61*(25-23)=24.22度。可以看出,因为温度计的协方差(covariance)比较小(比较相信温度计),所以估算出的最优温度值偏向温度计的值。
现在我们已经得到k时刻的最优温度值了,下一步就是要进入k+1时刻,进行新的最优估算。到现在为止,好像还没看到什么自回归的东西出现。对了,在进入k+1时刻之前,我们还要算出k时刻那个最优值(24.22度)的偏差。算法如下:((1-Kg)*5^2)^0.5=3.12。这里的5就是上面的k时刻你预测的那个23度温度值的偏差,得出的3.12就是进入k+1时刻以后k时刻估算出的最优温度值的偏差(对应于上面的3)。
就是这样,卡尔曼滤波器就不断的把(协方差(covariance)递归,从而估算出最优的温度值。他运行的很快,而且它只保留了上一时刻的协方差(covariance)。上面的Kg,就是卡尔曼增益(Kalman Gain)。他可以随不同的时刻而改变他自己的值,是不是很神奇!
下面就要言归正传,讨论真正工程系统上的卡尔曼。
卡尔曼滤波器算法 :
在这一部分,我们就来描述源于Dr Kalman 的卡尔曼滤波器。下面的描述,会涉及一些基本的概念知识,包括概率(Probability),随机变量(Random Variable),高斯或正态分配(Gaussian Distribution)还有State-space Model等等。但对于卡尔曼滤波器的详细证明,这里不能一一描述。
首先,我们先要引入一个离散控制过程的系统。该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:
X(k)=A X(k-1)+B U(k)+W(k)
再加上系统的测量值:
Z(k)=H X(k)+V(k)
上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。A和B是系统参数,对于多模型系统,他们为矩阵。Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。W(k)和V(k)分别表示过程和测量的噪声。他们被假设成高斯白噪声(White Gaussian Noise),他们的协方差(covariance)分别是Q,R(这里我们假设他们不随系统状态变化而变化)。
对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。下面我们结合他们的协方差来估算系统的最优化输出(类似上一节那个温度的例子)。
首先我们要利用系统的过程模型,来预测下一状态的系统。假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:
X(k|k-1)=A X(k-1|k-1)+B U(k) ……….. (1)
式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1)的协方差还没更新。我们用P表示协方差(covariance):
P(k|k-1)=A P(k-1|k-1) A’+Q ……… (2)
式(2)中,P(k|k-1)是X(k|k-1)对应的协方差,P(k-1|k-1)是X(k-1|k-1)对应的协方差,A’表示A的转置矩阵,Q是系统过程的协方差。式子1,2就是卡尔曼滤波器5个公式当中的前两个,也就是对系统的预测。
现在我们有了现在状态的预测结果,然后我们再收集现在状态的测量值。结合预测值和测量值,我们可以得到现在状态(k)的最优化估算值X(k|k):
X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|k-1)) ……… (3)
其中Kg为卡尔曼增益(Kalman Gain):
Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R) ……… (4)
到现在为止,我们已经得到了k状态下最优的估算值X(k|k)。但是为了要令卡尔曼滤波器不断的运行下去直到系统过程结束,我们还要更新k状态下X(k|k)的协方差:
P(k|k)=(I-Kg(k) H)P(k|k-1) ……… (5)
其中I 为1的矩阵,对于单模型单测量,I=1。当系统进入k+1状态时,P(k|k)就是式子(2)的P(k-1|k-1)。这样,算法就可以自回归的运算下去。
卡尔曼滤波器的原理基本描述了,式子1,2,3,4和5就是他的5 个基本公式。根据这5个公式,可以很容易用计算机编程实现。
在上面的例子中,过程误差和测量误差设定为4是为了讨论的方便。实际中,温度的变化速度以及温度计的测量误差都没有这么大。
假设如下一个系统:
房间内连续两个时刻温度差值的标准差为0.02度
温度计的测量值误差的标准差为0.5度
房间温度的真实值为24度
对温度的初始估计值为23.5度,误差的方差为1
MatLab仿真的代码如下:
% Kalman filter example of temperature measurement in Matlab
% This M code is modified from Xuchen Yao's matlab on 2013/4/18
%房间当前温度真实值为24度,认为下一时刻与当前时刻温度相同,误差为0.02度(即认为连续的两个时刻最多变化0.02度)。
%温度计的测量误差为0.5度。
%开始时,房间温度的估计为23.5度,误差为1度。
% Kalman filter example demo in Matlab
% This M code is modified from Andrew D. Straw's Python
% implementation of Kalman filter algorithm.
% The original code is from the link in references
% Below is the Python version's comments:
% Kalman filter example demo in Python
% A Python implementation of the example given in pages 11-15 of "An
% Introduction to the Kalman Filter" by Greg Welch and Gary Bishop,
% University of North Carolina at Chapel Hill, Department of Computer
% Science, TR 95-041,
% by Andrew D. Straw
% by Xuchen Yao
% by Lin Wu
clear all;
close all;
% intial parameters
n_iter = 100; %计算连续n_iter个时刻
sz = [n_iter, 1]; % size of array. n_iter行,1列
x = 24; % 温度的真实值
Q = 4e-4; % 过程方差, 反应连续两个时刻温度方差。更改查看效果
R = 0.25; % 测量方差,反应温度计的测量精度。更改查看效果
z = x + sqrt(R)*randn(sz); % z是温度计的测量结果,在真实值的基础上加上了方差为0.25的高斯噪声。
% 对数组进行初始化
xhat=zeros(sz); % 对温度的后验估计。即在k时刻,结合温度计当前测量值与k-1时刻先验估计,得到的最终估计值
P=zeros(sz); % 后验估计的方差
xhatminus=zeros(sz); % 温度的先验估计。即在k-1时刻,对k时刻温度做出的估计
Pminus=zeros(sz); % 先验估计的方差
K=zeros(sz); % 卡尔曼增益,反应了温度计测量结果与过程模型(即当前时刻与下一时刻温度相同这一模型)的可信程度
% intial guesses
xhat(1) = 23.5; %温度初始估计值为23.5度
P(1) =1; %误差方差为1
for k = 2:n_iter
% 时间更新(预测)
xhatminus(k) = xhat(k-1); %用上一时刻的最优估计值来作为对当前时刻的温度的预测
Pminus(k) = P(k-1)+Q; %预测的方差为上一时刻温度最优估计值的方差与过程方差之和
% 测量更新(校正)
K(k) = Pminus(k)/( Pminus(k)+R ); %计算卡尔曼增益
xhat(k) = xhatminus(k)+K(k)*(z(k)-xhatminus(k)); %结合当前时刻温度计的测量值,对上一时刻的预测进行校正,得到校正后的最优估计。该估计具有最小均方差
P(k) = (1-K(k))*Pminus(k); %计算最终估计值的方差
end
FontSize=14;
LineWidth=3;
figure();
估计的误差的方差
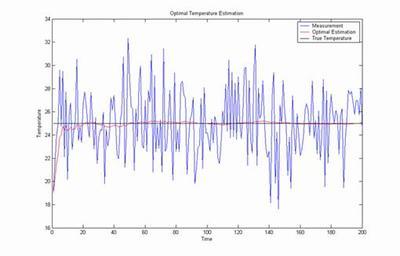
plot(z,'k+'); %画出温度计的测量值
hold on;
plot(xhat,'b-','LineWidth',LineWidth) %画出最优估计值
hold on;
plot(x*ones(sz),'g-','LineWidth',LineWidth); %画出真实值
legend('温度计的测量结果', '后验估计', '真实值');
xl=xlabel('时间(分钟)');
yl=ylabel('温度');
set(xl,'fontsize',FontSize);
set(yl,'fontsize',FontSize);
hold off;
set(gca,'FontSize',FontSize);
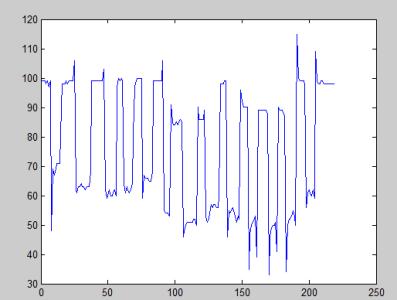
figure();
valid_iter = [2:n_iter]; % Pminus not valid at step 1
plot(valid_iter,P([valid_iter]),'LineWidth',LineWidth); %画出最优估计值的方差
legend('后验估计的误差估计');
xl=xlabel('时间(分钟)');
yl=ylabel('℃^2');
set(xl,'fontsize',FontSize);
set(yl,'fontsize',FontSize);
set(gca,'FontSize',FontSize);