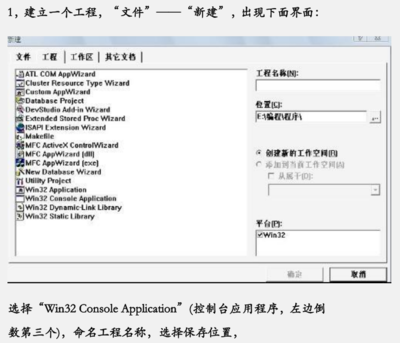
#include "ICETEK-VC5509-EDU.h"
#include "scancode.h"
#include <math.h>
#define PI 3.1415926
#define SAMPLENUMBER 128
void InitForFFT();
void MakeWave();
int INPUT[SAMPLENUMBER],DATA[SAMPLENUMBER];
float fWaveR[SAMPLENUMBER],fWaveI[SAMPLENUMBER],w[SAMPLENUMBER];
float sin_tab[SAMPLENUMBER],cos_tab[SAMPLENUMBER];
main()
{
int i;
InitForFFT();
MakeWave();
for ( i=0;i<SAMPLENUMBER;i++ )
{
fWaveR[i]=INPUT[i];
fWaveI[i]=0.0f;
w[i]=0.0f;
}
FFT(fWaveR,fWaveI);
for ( i=0;i<SAMPLENUMBER;i++ )
{
DATA[i]=w[i];
}
while ( 1 ); // break point
}
void FFT(float dataR[SAMPLENUMBER],float dataI[SAMPLENUMBER])
{
int x0,x1,x2,x3,x4,x5,x6,xx;
int i,j,k,b,p,L;
float TR,TI,temp;
/********** following code invert sequence ************/
for ( i=0;i<SAMPLENUMBER;i++ )
{
x0=x1=x2=x3=x4=x5=x6=0;
x0=i&0x01; x1=(i/2)&0x01; x2=(i/4)&0x01; x3=(i/8)&0x01;x4=(i/16)&0x01; x5=(i/32)&0x01; x6=(i/64)&0x01;
xx=x0*64+x1*32+x2*16+x3*8+x4*4+x5*2+x6;
dataI[xx]=dataR[i];
}
for ( i=0;i<SAMPLENUMBER;i++ )
{
dataR[i]=dataI[i]; dataI[i]=0;
}
/************** following code FFT *******************/
for ( L=1;L<=7;L++ )
{ /* for(1) */
b=1; i=L-1;
while ( i>0 )
{
b=b*2; i--;
} /* b= 2^(L-1) */
for ( j=0;j<=b-1;j++ ) /* for (2) */
{
p=1; i=7-L;
while ( i>0 ) /* p=pow(2,7-L)*j; */
{
p=p*2; i--;
}
p=p*j;
for ( k=j;k<128;k=k+2*b ) /* for (3) */
{
TR=dataR[k]; TI=dataI[k]; temp=dataR[k+b];
dataR[k]=dataR[k]+dataR[k+b]*cos_tab[p]+dataI[k+b]*sin_tab[p];
dataI[k]=dataI[k]-dataR[k+b]*sin_tab[p]+dataI[k+b]*cos_tab[p];
dataR[k+b]=TR-dataR[k+b]*cos_tab[p]-dataI[k+b]*sin_tab[p];
dataI[k+b]=TI+temp*sin_tab[p]-dataI[k+b]*cos_tab[p];
} /* END for (3) */
} /* END for (2) */
} /* END for (1) */
for ( i=0;i<SAMPLENUMBER/2;i++ )
{
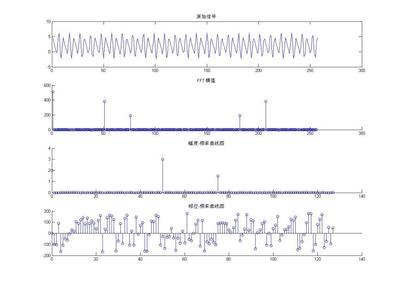
w[i]=sqrt(dataR[i]*dataR[i]+dataI[i]*dataI[i]);
}
} /* END FFT */
void InitForFFT()
{
int i;
for ( i=0;i<SAMPLENUMBER;i++ )
{
sin_tab[i]=sin(PI*2*i/SAMPLENUMBER);
cos_tab[i]=cos(PI*2*i/SAMPLENUMBER);
}
}
void MakeWave()
{
int i;
for ( i=0;i<SAMPLENUMBER;i++ )
{
INPUT[i]=sin(PI*2*i/SAMPLENUMBER*3)*1024;
}
}
这里面有些头文件可能找不到,这是我们老师提供的参考程序,这里只是给个参考,下次有时间我再注释下。
#include"myapp.h"
void CLK_init()
{
ioport unsigned int *clkmd;
clkmd=(unsigned int *)0x1c00;
*clkmd =0x2033; // 0x2033;//0x2413;// 200MHz=0x2513
}
void SetDSPPLL(unsigned int uPLL)
{
ioport unsigned int *clkmd;
clkmd=(unsigned int *)0x1c00;
*clkmd =uPLL;
}
void TMCR_reset( void )
{
ioport unsigned int *TMCR_MGS3=(unsigned int *)0x07FE;
ioport unsigned int *TMCR_MM =(unsigned int *)0x07FF;
*TMCR_MGS3 =0x510;
*TMCR_MM =0x000;
}