红外线报警器的简介
在需要防范的区域(如家里的客厅、卧室、厨房、走廊,仓库,商店等)安装好探测器之后,如果有盗贼进入防范区域,探测器就会探测到人体红外线,并立即发射经数字编码的报警信号,该信号由安装在一公里以内的红外报警器接收后,立即发出刺耳的警报声,惊吓盗贼,提醒主人,主人可根据红外报警器面板上的报警提示灯,明确报警地点,前往抓拿盗贼.本机还有自动记忆报警时间功能,如果主人没有在家,则回家后可知道盗贼何时光顾家里.红外线报警器的工作原理
红外报警器由报警主机和红外探测器组成报警系统.探测一旦探测到入侵,红外报警器立即把报警入侵信号无线密码传输到报警主机,主机接收到报警信号后,会立即启动高分贝警笛现场报警器,红外报警器主机面板上的LED显示报警防区,防区路数0-99路,明确显示入侵方位,同时报警主机还有时间显示、报警记录查询、自动开关机等功能.红外线报警器的功能
1、探测器和主机无线自动对码,即学习式编码,系统扩容简单快捷;2、100个独立无线防区,每个防区可单独撤布防,方便实用;
3、报警主机有两组定时开关机时间,并具有当前开、关机状态指示;
4、三种报警声、四级报警音量可选;
5、红外报警器可同时滚动显示最新十条报警信息;
6、可查询60条最近报警记录;
7、红外报警器可选配内置备用电源,并具有浮充装置和低电压告警功能;
8、提供一组常开、一组常闭报警输出和+12V直流输出,供其他设备控制使用;
9、加装拨号模块,报警时可实现自动拨打6组电话功能。
红外线报警器的安装方法
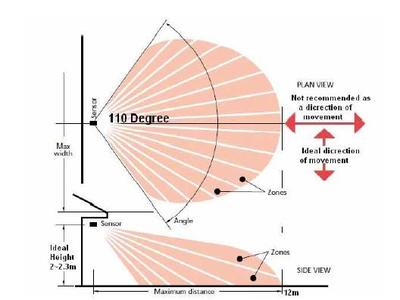
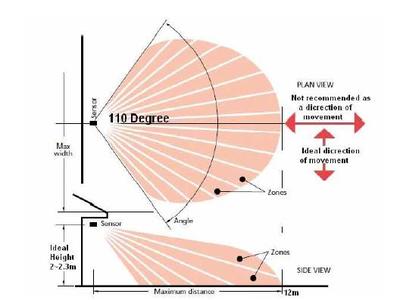
由于被动红外探测器是属于一种微弱信号检测设备,在安装对必须注意一些细节方面的问题,如高度,灵敏度等.正确安装一个被动红外探测器,必须掌握以下几个方面的信息:首先是对探测器的性能特点必须了解,其次要合理确定安装的位置,最后必须要仔细调试.不能说探测器能报警就说明安装好了,那么如何确定一个被动红外探测器的安装位置呢?进一步祥情请电:13650365604张生
*根据说明书确定正常的安装角度
安装高度不是随意的,会影响探测器的灵敏度和防小宠物的效果.试想一下,一个探测器装在2M高度的位置和2.5高度的位置,那么移动物体从地面移动时,切割明区和暗区的频率是不一样的.
*不宜面对玻璃门窗
被动红外探测器正对玻璃门窗,会有两个问题:一是白光干扰,显然PIR对白光具有很强的抑制功能,但毕竟不是100%的抑制.因此避免正对玻璃门窗,可以避免强光的干扰.二是避免门窗外复杂的环境干扰,比如人群流动、车辆等.
*不宜正对冷热通风口或冷热源
被动红外探测器感应作用是与温度的变化具有密切的关系.冷热通风口和冷热源均有可能引起探测器的误报,对有些低性能的探测器,有时通过门窗的空气对流也会造成误报.
*不宜正对易摆动的物体
易摆动的物体将会使微波探测器起作用,因此同样可能造成误报.古注意非法入侵路线安装探测器的目的足防止犯罪分子的非法入侵,在确定安装位置之前,必须要考虑建筑物主要出人口.实际上我们防止了出入口,截断非法入侵线路,也就达到了我们的目的.
*合理的选型
被动红外探测器具有多种型号.从6米到60米,从单红外到三红外,从壁挂式到吸顶式的都有,那么所要安装的探测器必须要考虑防范空间的大小,周边的环境,出入口的特性等实际状况.有时要考虑更换菲涅尔透镜来满足要求.
调试
将探测器安装完中后,调试探测器是最后所要做的工作.被动红外探测器的调试具有两种方法,一种是步测,就是调试人员在警戒区内走s型的线路来感知警戒范围的长度等宽放,从图中可以理解这一点.
微波灵敏度和红外灵敏度通过步测的方法要分别调整,过高或过低的灵敏度都将影响防范效果.有时由于季节变换,冬季和夏季要对灵敏度分别调整.微波灵敏度一定不能过大,因为微波只有穿透性,在调试的时候要注意.
第二种方法是仪表测量,有的探 测器有背景噪声电压输出接口,用万用表的电压来测试,当探测器在警戒状态下,它的静态背景噪声的输出电压的大小,表示干扰源的干扰程度,以此判断这一位置是否合适安以上部分只是作者对于被动红外探测器的使用及安装方法的基本共性作一点分析,各种品牌在红外处理方面具有其独特的方法,因此我们在使用安装前,必须仔细阅读说明书,最重要的是通过实际工作经验的积累,对探测器的特性一定能够更深刻的了解,从而更好的发挥被动红外探测器在安防工程中的作用.
基于单片机的红外线报警器设计
一.硬件电路
电路原理图如图1所示.可将该电路分为以下三个部分.
1 、电源电路
220V交流市电经变压器T降压 .桥式整流器D1整流. 电解电容C7滤波.三端稳压器78L05稳压,最后得到整机要求的+5V稳定直流电源.
2 、单片机系统.
U1为AT89C2051单片机.C1.R0,R1和复位按钮RESET组成手动电平复位和上电自动复位电路;C2.C3以及晶振T1组成时钟电路iC4.C5为+5V电源滤波电容.U2为CM0S6反相器CC4069 ,起驱动作用 .VD1 ~ VD6为红外发射管, 其负极端接与P1口.P1口设置为输出状态 ,当P1口为 .0时,VD1~VD6发红外光.VD7~VD12为红外接收管.当接收到红外光时导通,+5V电源通过VD7一VD12加到反相器CC4069的输入端,经反相为低电平,这时P3_0~P3.5为低电平.发管和接收管分别安装在门和窗口的适当位置.当有人闯入时遮挡了红外线,接收管截止.反相器输入端为低电平.这时U1的P3.0一P3.5为高电平.当在一定时间内检测到位于不位置的光束被遮挡时.则由P3.7口输出报警信号(高低电平间隔1S的脉冲信号).驱动声光报警电路.进声光报警.直至按复位按钮RESET或电源开关S1.由于红外收发管之间没有遮挡时为正常.有遮挡时为异常,则当 P 1口输出 o 0H时. P 3口的正常状态数据为00H.
3、声光报警电路 .
555定时器U4.扬声器BY, 普通红色发光二极管VD13等组成声光报警电路 . 其中555定时器接成了一个低频多谐振荡器 .其控制电压输入端5脚与单片机AT89C2051的P3.7脚相连,受P3.7脚输出的高低电平间隔1S的脉冲信号控制.当P3.7为高电平时控制电压Uco较高,阈值电压UT+(=Uco)和UT-(=1/2Uco)也较高 ;当P3.7为低电平时UT+和UT-也较低.当UT+较高时,电容C9充、放电的电压幅度较大.因而振荡频率较低.反之,当UT+较低时,电容C9充、放电过程中电压变化幅度较小.充、放电过程完成得较快,故振荡频率较高.即当P3.7=1时.555输出脉冲的振荡频率较低;当P3.7=0时.555输出脉冲的振荡频率高.该输出脉冲经过隔直电容C8加到扬声器上,扬声器将交替发出高、上位机的通信.液晶显示模块使用了12864的并行模式,数据端DB0-DB7与单片机的P2.0-P2.7相连,PSB控制12864工作在并行模式,电路中未接液晶的背光.RST复位端直接悬空.
通信协议
开始发送数据时,A1_89S52发出SS下降沿信号然后等待ZLG500在SDA线上的响应,若在50ms内未检测到此响应则退出本次传输(由SPI看门狗定时器实现)将错误代码返回给主程序由主程序进行错误处理.若ZLG500正确响应则AT89S52可将命令和数据发送出去,然后AT89S52等待ZLG500发回的状态和响应数据.即等待SS线上的下降沿的产生,此时的AT89S52用外部中断响应. 若在500ms内未检测到此信号则退出本次传输且向主程序报告错误代码(由SPI看门狗定时器实现).若正确检测到SS信号则可接收状态和数据.SS为数据发送使能,若一方有数据要发送给另一方,则该方控制SS线为低.并在发送结束后将该线置高. 接收数据方不得 控制该线.双方必须遵守通信协议.不得同时控制该线.SDAT为数据线由数据发送端控制数接收端必须释放该线,该线在一次传输开始时还同时作为数据接收端的响应信号.SPI线上信号波形圈见图4.
本系统主要由四个源程序实现分为三层. mface-3.asm为底层程序.定义最基本的函数且直接操作硬件zig500.C.12864.C为中层程序定义各种功能函数main.C为顶层程序直接调用底层和中层文件中的函数.其中zig500.C和m-face.asm由ZLG500模块的生产厂家提高低不同的两种叫声.同时P3.7脚输出的高低电平间隔1S的脉冲信号经电阻R8加到红色发光二极管VD13上.VD13将闪烁发光.达到声光同时报警的效果.
二.软件设计
我们的目标是,当检测到有人闯入时就由 P3713输出高低电平间隔1S的脉冲信号去驱动声光报警电路.产生声光报警.这可通过使P3.7口每隔1S取反一次实现.而1S时间可通过让定时器T0(工作于定时方式1)重复定时1OOms十次实现.用工作寄存器R1作循环计数器.初值为10(OAHo采用中断方式编程.整个软件由主程序和中断服务程序两部分构成.
1 、主程序.主要功能是对系统进行初始化和对系统进行监视看是否有人闯入.其程序流程图如图2所示.程序清单如下:
0RGO0O0H
AJMPMAIN ; 转向主程序
ORGO00BH : 定时器 T O中断八El
LJMPBJ ; 转向中断服务程序
0RG O030H
MAI N:MOV SP , #50H ;设置堆栈栈底
MOV R1.#OAH;设置循环计数器初值
MOV P3, # OOH;设置P3口为正常状态
MOV P1.#OOH;使VD1-VD6发红外光
MOV TMOD. #01H; 设TO为定时方式1
MOV TH0. # 3CH;设置定时100ms初值
M0V TL O. # OBOH
SETBEA ; CPU开中断
SETB ETO ;定时器0允许中断
JS:MOV A,P3 ; 监视是否有人闯入
CJNE A. #O OH. LP
由于设备生产厂家停产老机型,配件价高难购,导致我单位一台老型号数控塑钢门窗角缝清理机(简称清角机)闲置至今 .弃之可惜,留着无用.最近生产任务又比较紧.原定要购买一台新的清角机.但本着为单位减少资金投入的目的.决定对闲置清角机进行低投入改装.
经过仔细查看、分析:原机由数控电路控制步进电机拖动清角机构运动.精确控制清角机构进给、升降量.可原机 控制电路部分已经损坏,还缺少一只步进电机.但机械部分完好.因此决定舍去原机电路和步进电机等部分不用,只保留原机机械部分.改用一只气缸来拖动清角机构运动.机械定位来控制进给量.由多只气缸协作完成物件加工的工作过程.
机械部分改装办法确定了.但又怎样去控制它们的运行呢?想到以前用P111-G可编程控制器改装过其它生产设备.使用P111-G可编程控制器控制线路简洁、性价比高.编程简单、方便、快捷.决定选用P111-G可编程控制器来控制机械部分运行.改装方法构思好后.动手改装.先加装气缸、电磁阀、行程开关、限位装置等( 机械部分改 装后结构简图如上图) .再拆掉原机配电箱内所有电路并装入P111-G可编程控制器. 按拟定的线路配线接好相关
电路.一切就绪后 .重点转到对P111一G可编程控制器的编程上.下面介绍具体编程步骤:
AJMP JS
LP. SETBTR0 ; 启动T0定时
100ms
S JMP$ ;等待定时100ms
完成
2 、中断服务程序.主要功能是判断定时1S是否完成.从而决定是否对P3.7Iq取反.其程序流程图如图3所示.程序清单如下:
ORG 0060H
BJ :PUSHAcc ; 现场保护
PUSH PSW
MOV TH0 . #3CH ;重设定时初值
MOV TL0.B0H
DJNZ R1.FH
MOV R1. } }OAH
CPL P3.7
FH:POP PSW
POP Acc
RETl
END
;1S未到返回
;重设计数器初值
;P3.7口取反
:恢复现场
:中断返回
三.系统调试
1 、软件调试.
先在Keilc51 环境中 进行软件调试. 再利用编程器将调试好 的程序固化到AT89C2051单片机中.
2 、硬件调试
(1)检查线路应焊接无误.(2) 电 源电路调试 .断开负载.用万用表测量78L05的3脚应有+5v电压.(3)先不装入AT89C2051单片机.用短路线把U1插座的12脚接地.调整 VD1和VD7的安装位置和角度 ,测量U1插座的2脚电压.当VD1和VD7之间无遮挡时2脚电压为0伏,有遮挡时为+5伏.用相同方法反复调整其他几对红外收发管的位置和角度.使U1插座的3、6、7、8、9各脚的电压符合要求.(4)将固化好程序的AT89C2051插入电路中的U1插座上.接上电源即可工作.
简单的被动式红外线报警器的设计
引言
现在很多学校举办大学生科技创新普及竞赛,许多零基础的同学都参与到其中,重在培养了学生的科技创新热情,也在科技创新上给同学们指明看道路,让他们对科技得到新的认识,只要努力就会成功.
1设计任务
我们选择的是"简单的被动式红外线报警器".该报警器由红外线发射、接收、蜂鸣器和LED指示灯组成.正常情况下,绿色的LED常烁,表示监控区域正常.一旦监控区域有人闯入,绿色LED熄灭,红色的LED快速闪烁,同时蜂鸣器立即报警.
设计要求如下:
Ⅰ.红外发射频率为38KHZ
Ⅱ.正常情况下绿色LED闪烁,异常情况下红色LED闪烁并且蜂鸣器报警.
Ⅲ.监控区域范围在3M范围内.
分析整个题目及其要求,我们可以得到以下结论:
ⅰ.对于这个系统来说,属于被动式红外线报警器,我们的理解是在发射和接收两者之间连上一条红外线,当发射接收正常时GREEN灯闪烁,当有物体穿过时接收不到发射端的信号red灯就会快速闪烁,蜂鸣器也响;
ⅱ.整个系统的硬件部分包括单片机最小系统、红外发射部分、红外接收部分、蜂鸣器、red灯和GREEN灯几部分,我们可以分开设计,最后进行系统集成,以达到题目的要求;
ⅲ.整个系统的软件设计也很简单,首先是38K方波的发射,其次是用单片机控制GREEN灯、red灯、蜂鸣器等的工作.
2系统设计
2.1硬件设计
2.1.1单片机最小系统
对于这一部分,我们手上有现成的单片机最小系统,所以我们选择就地取材而没有另行制作,对于这个最小系统板上有扩展的程序下载接口和蜂鸣器模块,其电路图见后面的总电路图.
2.1.2红外发射部分
红外发射电路本身并不难,只要给与发射头足够的功率就能驱动它发射出红外线信号.可以选择两种最基本的方法来设计电路图,第一种是用单片机直接发射38K方波信号,用三极管来驱动发射头工作,这就要求我们用程序来发射38K的方波;第二种是用NE555芯片来设计成多谐振荡器,发射出38K方波.不管是在硬件和软件上,第二种设计方法都占优,所以我们选择第二种电路来设计.
设计电路如图一所示:
图一:NE555基本电路
对于上图,要求我们自己确定参数R1、R2和C1.计算时有输出高电平时间为:
t1 =0.693 (R1 +R2) C1
输出低电平的时间是:
t2 =0.693 (R2) C1
所以周期为:
T = t1+ t2 = 0.693 (R1 + 2R2) C1
频率有:
占空比为t1/(t1+t2).
从上面的公式中带入38K的频率就能确定各个参数.为此我们取C1为0.01uF,R1为560,R2取2K的电位器,这是为了排除电阻和电容的制作时的阻差和容差,为此我们可以精确地调到38K.
2.1.3红外接收部分
接收部分采用的是TSOP1838,图二是它的内部电路图:
图二:TSOP1838内部结构
它的内部集成了放大电路和带通滤波器,具有高选择性,但是这对我们的电路设计无疑是一大方便--不用自己加运算放大器.其设计电路见总电路图.
2.1.4LED灯和蜂鸣器
这算是最简单的硬件设计了.对于LED灯来说,接入回路中加一限流电阻就可以了,二蜂鸣器则需要加一三极管用来驱动,电路见总电路图.
2.1.5整体框架图
图三:系统总体方框图
2.2软件设计
程序设计流程图如图四:
图四:程序流程图
3创新点
本系统的最大优点是电路设计简单,程序调试简单,且价格便宜.不仅达到题目要求,还能超过标准,测试能达到六米.如果再加大发射端的功率,测试的距离还能更远.但是发射头的温度更高,即不稳定也不安全.综合考虑,我们没有为了更好的技术指标而增加系统的负担.
4学习心得体会
经过努力,我们超标完成了这个题目.从这次比赛中,我们的科技创新热情大大高涨,我们也从中学到了很多东西,提高了自己的动手能力.
附录
1系统总电路图
2元器件清单
3源程序
#include<reg52.h>
#defineuchar unsigned char
#defineuint unsigned int
uchara;
sbitred=P1^0;
sbitGREEN=P1^1;
sbitbuzzer=P1^2;
sbitcheck=P1^3;
voiddelay(uint ww)
{ uintgg,h;
for(gg=ww;gg>0;gg--)
for(h=110;h>0;h--);
}
voidmain()
{
red=1;
GREEN=1;
buzzer=1;
while(1)
{
a=check;
if(a==0)
{
delay(500);
GREEN=0;
delay(500);
GREEN=1;
}
else
{
buzzer=0;
red=0;
delay(100);
red=1;
buzzer=1;
delay(100);
}
}
}
专业报警器研发,生产厂家,可承接各类报警器产品项目研发:包括家用报警器、gsm报警器、红外探测器、烟感报警器、气体传感器、汽车报警器、GPS定位器等;技术联系电话:0755-28932827 / 手机:13510472770 /QQ:276968251/962826028/