程序一
利用动态扫描方法在六位数码管上显示出稳定的654321.
时钟频率为11.0592M
#include<reg52.h>//52单片机头文件
#include <intrins.h>//包含有左右循环移位子函数的库
#define uint unsignedint//宏定义
#define uchar unsigned char //宏定义
sbitdula=P2^6;//数码管段选锁存端
sbitwela=P2^7;////数码管位选锁存端
uchar code table[]={//数码管显示编码
0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71};
void display(uchar,uchar,uchar,uchar,uchar,uchar); //函数声明
void delay(uint);
void main()
{
while(1)
{
display(6,5,4,3,2,1);//始终显示
}
}
void display(ucharone,uchar two,uchar three,uchar four,uchar five,uchar six)
{
dula=1;
P0=table[one];//送段数据
dula=0;
P0=0xff;//送位数据前关闭所有显示,防止打开位选锁存后段选数据通过位选锁存器
wela=1;
P0=0xfe;
wela=0;
delay(1);
dula=1;
P0=table[two];
dula=0;
P0=0xff;
wela=1;
P0=0xfd;
wela=0;
delay(1);
dula=1;
P0=table[three];
dula=0;
P0=0xff;
wela=1;
P0=0xfb;
wela=0;
delay(1);
dula=1;
P0=table[four];
dula=0;
P0=0xff;
wela=1;
P0=0xf7;
wela=0;
delay(1);
dula=1;
P0=table[five];
dula=0;
P0=0xff;
wela=1;
P0=0xef;
wela=0;
delay(1);
dula=1;
P0=table[six];
dula=0;
P0=0xff;
wela=1;
P0=0xdf;
wela=0;
delay(1);
}
void delay(uintz)//延时子函数
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
程序二
用动态扫描方法和定时器1在数码管的前三位显示出秒表,
精确到1%秒,即最后一位显示1%秒,一直循环下去
#include<reg52.h>//52单片机头文件
#include <intrins.h>//包含有左右循环移位子函数的库
#define uint unsignedint//宏定义
#define uchar unsigned char //宏定义
sbitdula=P2^6;//数码管段选锁存端
sbitwela=P2^7;////数码管位选锁存端
uchar ge,shi,bai;
uint tt;
uchar code table[]={
0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71};
void display(uchar,uchar,uchar); //函数声明
void delay(uint);
void main()
{
TMOD=0x10;//设置定时器1为工作方式1
TH1=(65536-10000)/256;
TL1=(65536-10000)%256;
EA=1;//开总中断
ET1=1;//开定时器1中断
TR1=1;//启动定时器1
while(1)
{
display(bai,shi,ge);
}
}
void exter0()interrupt 3 // 定时器1中断
{
TH1=(65536-10000)/256;
TL1=(65536-10000)%256;
tt++;
if(tt==1000)
tt=0;
bai=tt/100;
shi=tt%100/10;
ge=tt%10;
}
void display(ucharone,uchar two,uchar three)
{
dula=1;
P0=table[one];//送段数据
dula=0;
P0=0xff;//送位数据前关闭所有显示,防止打开位选锁存后段选数据通过位选锁存器
wela=1;
P0=0xfe;
wela=0;
delay(1);
dula=1;
P0=table[two];
dula=0;
P0=0xff;
wela=1;
P0=0xfd;
wela=0;
delay(1);
dula=1;
P0=table[three];
dula=0;
P0=0xff;
wela=1;
P0=0xfb;
wela=0;
delay(1);
}
void delay(uintz)//延时子函数
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
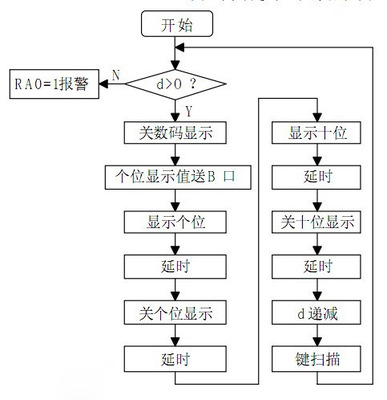
程序三
利用动态扫描和定时器1在数码管上显示
出从765432开始以1/10秒的速度往下递减
直至765398并保持显示此数,与此同时利
用定时器0以500MS速度进行流水灯从上至
下移动,当数码管上数减到停止时,实验
板上流水灯也停止然后全部开始闪烁,3秒
后(用T0定时)流水灯全部关闭、数码管上
显示出"HELLO"。到此保持住。
#include<reg52.h>//52单片机头文件
#include <intrins.h>//包含有左右循环移位子函数的库
#define uint unsignedint//宏定义
#define uchar unsigned char //宏定义
sbit dula=P2^6;
sbit wela=P2^7;
uchar code table[]={//显示数据编码
0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,
0x76,0x79,0x38,0x3f,0};
uchar temp,t0,t1,bai,shi,ge,flag,flag1;
uint shu;
voidinit();//函数声明
void display(uchar aa,uchar bb,uchar cc,uchar bai,uchar shi,ucharge);
void delay(uintz)//延时子函数
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
voidmain()//主函数
{
init();
while(1)
{
if(flag1!=1)//如果flagi不再等于1则显示数据
display(7,6,5,bai,shi,ge);
else
display(16,17,18,18,19,20);//否则显示hello
}
}
voidinit()//初始化函数
{
shu=432;
temp=0xfe;
P1=temp;
TMOD=0x11;
TH0=(65536-50000)/256;//定时器初始化
TL0=(65536-50000)%256;
TH1=(65536-50000)/256;
TL1=(65536-50000)%256;
EA=1;
ET0=1;
ET1=1;
TR0=1;
TR1=1;
}
void timer0()interrupt 1 //定时器0中断
{
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
t0++;
if(flag!=1)//flag不等于1时进行流水灯
{
if(t0==10)
{
t0=1;
temp=_crol_(temp,1);
P1=temp;
}
}
else//否则进行灯闪烁
{
if(t0%4==0)//小灯每200毫秒变化一次
P1=~P1;
if(t0==60)
{
TR0=0;//3秒后关闭定时器0,关闭灯,并置flag=1
P1=0xff;
flag1=1;
}
}
}
void timer1()interrupt 3 //定时器1中断函数
{
TH1=(65536-50000)/256;
TL1=(65536-50000)%256;
t1++;
if(t1==2)
{
t1=0;
shu--;
bai=shu/100;
shi=shu%100/10;
ge=shu%10;
if(shu==398)//当到398时把原来T0中的数清除,重新加裁初值让小灯闪烁
{
TR0=0;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
flag=1;
t0=0;
P1=0xff;
TR1=0;
}
}
}
void display(ucharaa,uchar bb,uchar cc,uchar bai,uchar shi,uchar ge) //显示子函数
{
dula=1;
P0=table[aa];
dula=0;
P0=0xff;
wela=1;
P0=0xfe;
wela=0;
delay(1);
dula=1;
P0=table[bb];
dula=0;
P0=0xff;
wela=1;
P0=0xfd;
wela=0;
delay(1);
dula=1;
P0=table[cc];
dula=0;
P0=0xff;
wela=1;
P0=0xfb;
wela=0;
delay(1);
dula=1;
P0=table[bai];
dula=0;
P0=0xff;
wela=1;
P0=0xf7;
wela=0;
delay(1);
dula=1;
P0=table[shi];
dula=0;
P0=0xff;
wela=1;
P0=0xef;
wela=0;
delay(1);
dula=1;
P0=table[ge];
dula=0;
P0=0xff;
wela=1;
P0=0xdf;
wela=0;
delay(1);
}