单片机电子秤毕业设计
摘 要
在设计系统时,为了更好地采用模块化设计法,分步的设计各个单元功能模块,系统的硬件部分可以分为最小系统、数据采集、人机交互界面和系统电源四大部分,所以用51系列单片机AT89S52为控制核心,实现电子秤的基本控制功能。最小系统部分主要包括AT89S52和扩展的外部数据存储器;数据采集部分由压力传感器、信号的前级处理和A/D转换部分组成,包括运算放大器和A/D转换器;人机交互界面为键盘输入和LED显示,可以方便的输入数据和直观的显示中文。系统电源以LM317和LM337为核心设计电路以提供系统正常工作电源。软件部分应用单片机汇编语言进行编程,实现了该设计的全部控制功能。该电子秤可以实现基本的称重功能(称重范围为0~9.999Kg,重量误差不大于±0.005Kg),并发挥部分的显示购物清单的功能,可以设置日期和设定十种商品的单价, 还具有超量程和欠量程的报警功能。整个系统结构简单,使用方便,功能齐全,精度高,具有一定的开发价值。
关键词:AT89S52单片机;A/D转换器;LED显示
1 引言
称重技术自古以来就被人们所重视。公元前,人们为了对货物交换量进行估计,起初采用木材或陶土制作的容器对交换货物进行计量。以后,又采用简单的秤来测定质量。据考证,世界上最古老的计量器具出土于中东和埃及,最古老的衡器和砝码出自于埃及。秤是最普遍、最普及的计量设备,电子秤取代机械秤是科学技术发展的必然规律。低成本、高智能化的电子秤无疑具有极其广阔的市场前景。
21世纪,电子产品变得越来越丰富,给人们带来了很多很多的方便,其中电子秤成了人们生活中不可缺少的一部分。大大小小的市场电子秤能够完成许多工作,为人们节省了时间,提高了工作效率。
在超市里的一台电子秤,它能很精确的称出商品的重量,还能去除皮重,更主要的是,它其中预存了超市里商品的单价,当称出商品的重量后,电子秤马上就能算出价格,不管几种商品都能一一累加,最后列出清单,可以说非常的智能化,而且非常的精确。
2系统方案的设计
2.1电子秤设计的基本要求
1电子秤称重范围:0~9.999Kg
2 LED显示
2.2 设计方案论证及选择
方案一:
通过秤重电桥产生电压信号,经放大电路把信号放大后输入A/D转换芯片进行A/D转换,由于此芯片可直接用于数字显示,故转换后的数字量直接用数码显示器进行显示。此方案的优点是外部电路非常简单,能实现较高的精度。缺点是无法对A/D转换进行控制。
显示电路
A/D转换电路
放大电路
数据采集电路
SHAPE * MERGEFORMAT
方案一方框图
方案二
通过称重电桥产生电压信号,经放大电路把信号放大后输入A/D转换芯片进行数据转换,再将得到的数字信号送至单片机进行处理并送入LED显示。此方案的优点是可控制性好,电路简单,原理思路清晰,LED的硬件电路也比数码管简单,且技术领先于数码管,能提高产品档次,采用单片机对采集的数据稍加处理,能通过软件在一定程度上弥补与调试硬件所无法避免的数据抖动,使最终所测得的数据更可靠、参考性更强,而且单片机的价钱也不算昂贵,在设计组所能承受的范围之内。
单
片
机
自动换挡电路
显示电路
A
D
转
换
放大电路
数据采集电路
SHAPE * MERGEFORMAT
方案二方框图
所以综合各方面条件我们选择方案二作为最终设计方案。
3 硬件电路的设计
3.1电阻应变式传感器的选择
应变式电阻传感器的工作原理:当导体或半导体受到外力作用时,会产生机械变形,从而导致阻值变化。导体与半导体的电阻与电阻率及其几何尺寸有关。当导体受外力作用时,电阻率及几何尺寸的变化会引起电阻的变化。因此,通过测量电阻值的大小,就可以反映外界力的大小。
电阻型应变片传感器的测量电路可采用桥式测量电路(图3.1)。桥式测量电
路有四个电阻,其中任何一个电阻均可以是应变片。
应变片式电阻传感器按其测量电路(桥式)可分为单臂式、半桥式、全桥式三种。
所谓半桥,即将电桥的四臂接入四应变片。其中:一片受拉,一片受压,另外两应变片不受力。全桥是两片受拉,两片受压,故灵敏度比半桥式的大一倍。
本方案采用全桥式传感器。
3.2三运放大电路的设计
本次课程设计中,需要一个放大电路,我们将采用三运放大电路(图3),主要的元件就是三运放大器。在许多需要用A/D转换和数字采集系统中,多数情况下,传感器输出的模拟信号都很微弱,必须通过一个模拟放大器对其进行一定倍数的放大,才能满足A/D转换器对输入信号电平的要求,在此情况下,就必须选择一种符合要求的放大器。
图(3)三运放大电路结构图
为使系统产生的误差更小,传统上,设计秤重、测力、转矩及压力测量系统时,输出的数据更精确广泛采用全桥接电阻传感器的方法。本设计采用全桥测量电路。大多数桥接传感器都要求较高的激励电压(通常为10 V),同时输出较低的满量程差动电压,约为2 mV/V。传感器的输出通常由仪表放大器加以放大。
3.3 A/D转换器
在实际的测量和控制系统中检测到的常是时间、数值都连续变化的物理量,这种连续变化的物理量称之为模拟量,与此对应的电信号是模拟电信号。模拟量要输入到单片机中进行处理,首先要经过模拟量到数字量的转换,单片机才能接收、处理。实现模/数转换的部件称A/D转换器或ADC。
随着大规模集成电路技术的飞速发展和电子计算机技术在工程领域的广泛应用,为满足各种不同的检测及控制任务的需要,大量结构不同、性能各异的A/D转换电路不断产生。目前世界上有多种类型的ADC,有传统的积分型、并行、逐次逼近型ADC,压频变换型ADC,也有近年来发展起来的△-∑型和流水线型。多种类型的ADC各有其优缺点并能满足不同的具体要求。低功耗、高速、高分辨率是新型的ADC的发展方向。
MAX187简介
MAX187/MAX189 串行12 位模数转换器可以在单5V 电源下工作,接受0-5V 的模拟输入。MAX187,189 均为逐次逼近式ADC,快速采样/保持(1.5uS),片内时钟,高速3 线串行接口。MAX187/MAX189 转换速度为75Ksps。通过一个外部时钟从内部读取数据,并可省却外部硬件而与绝大多数的数字信号处理器或微控制器通讯。接口与SPI,QSPI,和Microwire兼容。MAX187 有内部基准,MAX189 则需要一个外部基准。MAX187 和MAX189 采用节约空间的8 脚DIP 和16 脚SO 封装。电源消耗为7.5mW,在关断模式下可以减少至10uW。优异的AC 特性和极低的电源消耗,同时及其容易的使用和较小的封装尺寸使得MAX187/189 能理想的应用于远程DSP 和传感器,或者应用于对电源消耗和空间极为苛刻的地方。
应用范围:
? 移动式数据处理(Portable Data Logging)
? 远程数字信号处理(Remote Digital Signal Processing)
? 隔离数据获取(Isolated Data Acquisition)
? 高精度处理控制(High-Accuracy Process Control)
特性:
? 12 位精度
? ±1/2 LSB 完整非线性(Integral Nonlinearity)(MAX187A/MAX189A)
? 内部采样/保持电路,75KHz 采样速率
? 单+5V 电源工作
? 低功耗:关断模式下2uA
? 5mA 操作电流
? 内部4.096V 基准(MAX187)
? 3 线串行接口,SPI,QSPI 和Microwire 兼容
? 小管脚8 脚DIP 和16 脚SO 封装
管脚说明如图4:
图4 :MAX187管脚说明
3.4 LED显示电路的设计
LED显示块是由发光二极管显示字段的显示器件。在单片机应用系统中通常使用的是七段LED。这种显示块有共阴极与共阳极两种。共阴极LED显示块的发光二极管阴极共地。当某个发光二极管的阳极为高电平时,发光二极管点亮;共阳极LED显示块的发光二极管阳极并接。
3.4.1 LED显示器与显示方式
在单片机应用系统中使用LED显示块构成N位LED显示器。N位LED显示器有N根位选线和8*N根段选线。根据显示方式不同,位选线与段选线的连接方法不同。段选线控制字符选择,位选线控制显示位的亮,暗。
LED显示器有静态显示与动态显示两种方式。我们使用的为动态显示 LED动态显示方式。
在多位LED显示时,为了简化电路,降低成本,将所有位的段选线并联在一起,由一个8位I/O口控制,而共阴极点或共阳极点分别由响应的I/O口线控制。
图
单片机的接口电路LED显示电路图
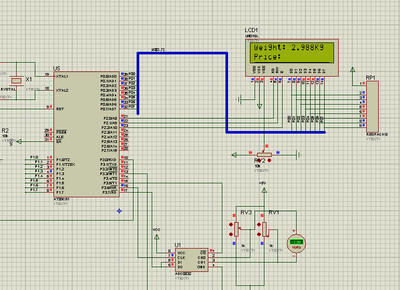
3.5 总体工作电路原理图
放大电路图
放大与A/D转换电路
总体电路图
4 软件的设计
;AD转换器通道IN0地址 7FF8H
;8155 PA口地址 7F01H
; PB口地址 7F02H
FLAG BIT 7FH
ORG 0000H
AJMP MAIN
ORG 0013H
AJMP INT1
MAIN:
SETB IT1
SETB EA
SETB EX1
LCALL AD_SORT
LCALL BCD_SORT
LCALL DISLED
LCALL DELAY_LO
AJMP MAIN
AD_SORT:
MOV R0,#60H
SETR FLAG
MOVX DPTR,#7FF8H
MOVX @DPTR,A
WAIT:
JB FLAG,WAIT
RET
INT1:
MOVX A,@DPTR
MOV @R0,A
CLR FLAG
RET1
DLSLED:
MOV R3,#01H
MOV A,R3
LOOP:
MOV DPTR,#7F01H
MOVX @DPTR,A
INC DPTR
MOV A,@R0
ADD A,#0DH
MOVC A,@A+PC
DIR1:
MOVX @DPTR,A
LCALL TIM2
INC R0
MOV A,R3
JB ACC.1,LOOP1
RL A
MOV R3,A
AJMP LOOP
LOOP1:
RET
TIM2:
MOV R7,#04H
DLT1:
MOV R6,#FFH
DLT2:
DJNZ R6,DLT2
DJNZ R7,DLT1
RET
BCD_SORT:
MOV A,@R0
RL A
MOV B,#10H
DIV AB
MOV @R0,B
INC R0
MOV @R0,A
RET
DELAY_LO:
PUSH 0
PUSH 1
PUSH 2
MOV 0,#01H;
DELAY_LO1:MOV 1,#00H
DELAY_LO2:MOV 2,#0B2H;
DJNZ 2,$
DJNZ 1,DELAY_LO2
DJNZ 0,DELAY_LO1
POP 2
POP 1
POP 0
RET
END
5 设计总结
经过几天的努力,终于如期完成了实用电子秤设计任务。在设计过程中,虽然碰到了不少的困难,但是在老师的指导以及自己的努力下,终于取得了一定成果。
一、 主要工作及结论
1、熟悉AT89S52芯片的功能及工作特性,掌握其接口扩展方法。
2、通过对数据采集的分析,了解了各种传感器、放大器及A/D转换器,对信号的转换、传输有了更深的认识。
3、对键盘和显示器进行选型比较,得出各种型号优劣比。
4、采用面向对象的思想,分层次、分模块构建设计的总体框架。
二、 存在的问题
1、电子电路的设计中对各种影响因素的考虑不够完全,比如在对过电压情况的处理中未作防范措施。
2、系统设计不够优化,有待改善。比如系统的超量程和欠量程信号直接由A/D转换器送入报警电路,没有先送入单片机处理后再送入报警电路。
3、可扩展更多电路,如日历时钟电路、通讯接口电路等。日历时钟电路可以显示购货日期,通讯接口电路可以与上位机(PC机)进行通讯,从而将大量的商品数据存于上位机,然后通过串口或并口通讯与电子称相连,达到远距离控制的目的。
4、对各种实用芯片价格了解不够,选择上任有欠缺,如所选的称重传感器价格较贵,达好几百元。
5、动手能力不强,电子秤的实物没能最终实现。
这些都是我以后要继续研究的内容。
参考文献:
1、 马心凯.基于FPGA的实用电子秤[J],低压电器,2006
2、 康华光.电子技术基础[M].模拟部分.高等教育出版社,1998
3、 于敬芬.基于AT89S52和TLC0834的数据采集系统[J].中国水运(学术版),2006
4、 王幸之.AT89系列单片机原理及接口技术[M].北京航天航空出版社,2006
5、 康华光.电子技术基础[M].数字部分.高等教育出版社,1998
6、 王素珍,郑淑芬,周梅.称重配料系统传感器电源及放大电路[J].传感器技术,2006
7、 周立功.单片机ZLG7289B串行接口LED数码管及键盘管理器件数据手册