发布时间:2024年11月06日 14:57:44分享人:庸俗措辭来源:互联网11
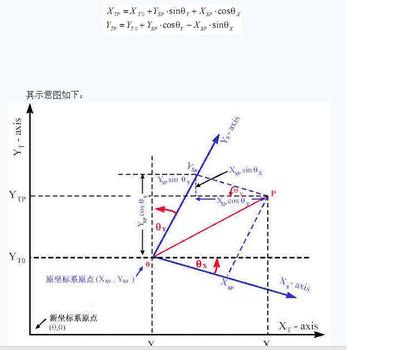
OpenGL学习脚印: 理解坐标系及坐标变换(上)
写在前面
本文为学习计算机图形学及利用OpenGL开发图形程序做数学准备工作。有关3D math的学习不是一蹴而就的,因此这里整理总结的是图形学中的基本数学问题。参考资料列在文章末尾。如有错误请纠正我。
鉴于OpenGL中使用列向量表达向量,因此本节统一使用列向量表达向量,必要时使用转置表达行向量。
1.三大空间
在计算机图形学中,需要表示和处理像点和线段这样的几何元素,为此要用到的数学知识可以在各种类型的抽象空间的研究中找到。
这里我们认识3类这样的空间:向量空间vector space(线性空间linear space)、仿射空间affine space、欧几里得空间Euclid space 。
1.1向量空间
向量空间包含两类对象:标量(scalar)和向量(vector)。
标量是只有大小而没有方向的量。例如实数就是标量的例子。标量是对我们平时所用数字的技术称谓。使用该术语时是想强调数量值。
在两个标量之间定义了两种基本运算,即加法和乘法,这两种运算满足交换律、结合律和分配律。这就是我们熟悉的加减法中使用的规律:
[plain] view plaincopyprint?
爱华网本文地址 » http://www.413yy.cn/a/25101012/122164.html
更多阅读
德馨小学五年三班的同学们:《西门豹治邺》选自司马迁的《史记》。为了帮助同学们更好的理解课文,拓展知识,老师特地搜集了原版(文言文)《西门豹治邺》及其译文。大家对照看看,有利于提高大家的古文理解能力。西门豹治邺这篇讲读课文讲

各种买卖指令Buy说明产生一个多头建仓操作。语法Buy(NumericShare=0,Numeric Price=0,Bool Delay=False)参数Share买入数量,为整型值,默认为使用系统设置参数;Price买入价格,为浮点数,默认=0时为使用现价(非最后Bar为Close);Delay买入动

郑板桥先生百首题兰画诗、词及跋文鉴赏(上)四川会理 刘 世 渡中国兰文化能成为一项具有世界意义的文化遗产,是千百年来中华民族一代又一代优秀儿女知识的积累和心血的结晶。出于对中国兰文化的仰慕和爱戴,也出于对中国兰文化遗产的继
一直想总结一下傅里叶变换、拉氏变换的公式,正好看到原来我之前总结过,还总结到word里了,正好上传上来吧。系统:单位脉冲响应:系统特征函数:所以傅里叶级数:连续周期信号
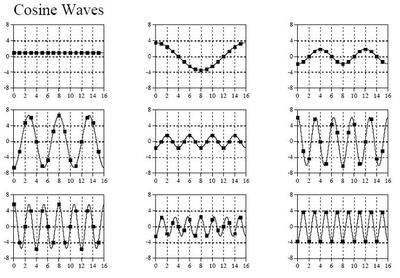
傅里叶变换:数字音频播放器MP3、图片压缩JPEG和苹果智能语音助手Siri背后的数学九年前,在学校的物理数学课的课堂上,我的老师为我们讲授了一种新方法,至今仍印象深刻。毫不夸张地说,数学理论发现迄今最广泛的应用就是这一方法了,其涵盖的