转载自:http://blog.csdn.net/yjz_uestc/article/details/6664937
Canny边缘检测是被公认的检测效果最好的边缘检测方法,是由JohnF.Canny于1986年提出,算法目标是找出一个最优的边缘检测的方法,所谓最优即:1.好的检测:算法能够尽可能的标识出图像的边缘;2.好的定位:标识出的边缘要尽可能的与实际边缘相接近;3.最小响应:图像中的边缘只能标识一次,并且不能把噪声标识成边缘。同时我们也要满足3个准则:信噪比准则、定位精度准则、单边缘响应准则。
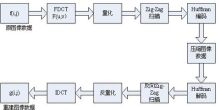
Canny边缘检测算法可分为4步:
高斯滤波器平滑、计算梯度、非极大值抑制、双阈值边缘检测和边缘连接。
(经典不会随着时间褪色,算法也是一样)
下面将逐步讲解并给出程序:
第一步:高斯平滑
为什么要对图像(灰度图像)进行高斯平滑预处理呢?高斯滤波器对去除服从正态分布的的噪声很有效,我做过实验,随着高斯模板的增大,被识别的边缘会逐渐减少,所以通过选着适合大小的高斯模板平滑,可以比较有效的去除一些伪边缘点。
第二步:计算梯度
首先,由一阶导数算子(一般用sobel模板)计算灰度图像每个像素点在水平和竖直方向上的导数Gx、Gy,得出梯度向量(Gx,Gy),计算梯度的值G和方向theta:
G=sqrt(Gx*Gx+Gy*Gy)theta=arctan(Gy/Gx)
然后,将每个像素点的梯度的值和方向分别放入两个数组中,程序如下:
[csharp]viewplaincopy- <span>byte[]orients=newbyte[width*height];//梯度方向数组
- float[,]gradients=newfloat[width,height];//梯度值数组
- doublegx,gy;
- for(inti=1;i<(height-1);i++)
- {
- for(intj=1;j<(width-1);j++)
- {
- //求水平和竖直导数
- gx=bufdata[(i-1)*width+j]+bufdata[(i+1)*width+j]-bufdata[(i-1)*width+j-1]-bufdata[(i+1)*width+j-1]+2*(bufdata[i*width+j+1]-bufdata[i*width+j-1]);
- gy=bufdata[(i-1)*width+j-1]+bufdata[(i+1)*width+j+1]-bufdata[(i+1)*width+j-1]-bufdata[(i+1)*width+j+1]+2*(bufdata[(i-1)*width+j]-bufdata[(i+1)*width+j-1]);
- gradients[j,i]=(float)Math.Sqrt(gx*gx+gy*gy);
- if(gx==0)
- {
- orientation=(gy==0)?0:90;
- }
- else
- {
- doublediv=(double)gy/gx;
- if(div<0)
- {
- orientation=180-Math.Atan(-div)*toAngle;
- }
- else
- {
- orientation=Math.Atan(div)*toAngle;
- }
- //只保留成4个方向
- if(orientation<22.5)
- orientation=0;
- elseif(orientation<67.5)
- orientation=45;
- elseif(orientation<112.5)
- orientation=90;
- elseif(orientation<157.5)
- orientation=135;
- elseorientation=0;
- }
- orients[i*width+j]=(byte)orientation;
- }
- }</span>
第三步:非极大值抑制
如果直接把梯度作为边缘的话,将得到一个粗边缘的图像,这不满足上面提到的准则,我们希望得到定位准确的单像素的边缘,所以将每个像素点的梯度与其梯度方向上的相邻像素比较,如果不是极大值,将其置0,否则置为某一不大于255的数,程序如下:
[csharp]viewplaincopy- <span>floatleftPixel=0,rightPixel=0;
- for(inty=1;y<height-1;y++)
- {
- for(intx=1;x<width-1;x++)
- {
- //获得相邻两像素梯度值
- switch(orients[y*width+x])
- {
- case0:
- leftPixel=gradients[x-1,y];
- rightPixel=gradients[x+1,y];
- break;
- case45:
- leftPixel=gradients[x-1,y+1];
- rightPixel=gradients[x+1,y-1];
- break;
- case90:
- leftPixel=gradients[x,y+1];
- rightPixel=gradients[x,y-1];
- break;
- case135:
- leftPixel=gradients[x+1,y+1];
- rightPixel=gradients[x-1,y-1];
- break;
- }
- if((gradients[x,y]<leftPixel)||(gradients[x,y]<rightPixel))
- {
- dis[y*disdata.Stride+x]=0;
- }
- else
- {
- dis[y*disdata.Stride+x]=(byte)(gradients[x,y]/maxGradient*255);//maxGradient是最大梯度
- }
- }
- }</span>
第四步:双阈值边缘检测
由上一步得到的边缘还有很多伪边缘,我们通过设置高低双阈值的方法去除它们,具体思想是:梯度值大于高阈值的像素点认为其一定是边缘,置为255,梯度值小于低阈值的像素点认为其一定不是边缘置为0,介于两阈值之间的点像素点为待定边缘。然后,考察这些待定边缘点,如果其像素点周围8邻域的梯度值都小于高阈值,认为其不是边缘点,置为0;至于,如何设定双阈值大小,我们可以根据实际情况设定,如设成100和20,也可以根据图像梯度值的统计信息设定,一般小阈值是大阈值的0.4倍即可。程序如下:
[csharp]viewplaincopy- <span>fmean=fmean/maxGradient*255;//某统计信息
- highThreshold=(byte)(fmean);//高阈值
- lowThreshold=(byte)(0.4*highThreshold);//低阈值
- for(inty=0;y<height;y++)
- {
- for(intx=0;x<width;x++)
- {
- if(dis[y*disdata.Stride+x]<highThreshold)
- {
- if(dis[y*disdata.Stride+x]<lowThreshold)
- {
- dis[y*disdata.Stride+x]=0;
- }
- else
- {
- if((dis[y*disdata.Stride+x-1]<highThreshold)&&
- (dis[y*disdata.Stride+x+1]<highThreshold)&&
- (dis[(y-1)*disdata.Stride+x-1]<highThreshold)&&
- (dis[(y-1)*disdata.Stride+x]<highThreshold)&&
- (dis[(y-1)*disdata.Stride+x+1]<highThreshold)&&
- (dis[(y+1)*disdata.Stride+x-1]<highThreshold)&&
- (dis[(y+1)*disdata.Stride+x]<highThreshold)&&
- (dis[(y+1)*disdata.Stride+x+1]<highThreshold))
- {
- dis[y*disdata.Stride+x]=0;
- }
- }
- }
- }
- }</span>
最后,效果图如下:
原图:
灰度图:
边缘图: